Welcome to Isaac Teleop#
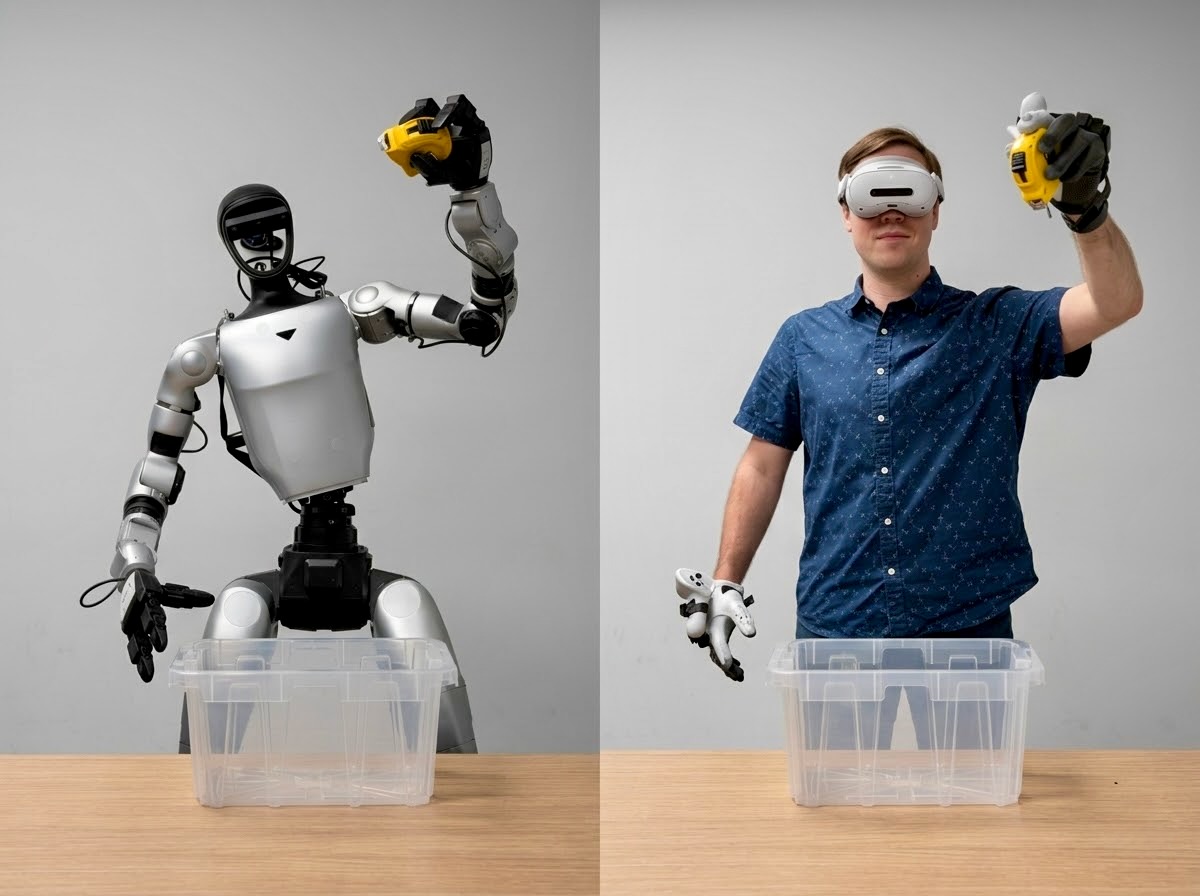
Isaac Teleop (GitHub repo) is the unified framework for high-fidelity egocentric and robot data collection. It provides a standardized device interface, a flexible graph-based retargeting pipeline, and a streamlined data collection workflow that work seamlessly across simulated and real-world robots.
Key features:
Unified stack for sim and real teleoperation (ROS2, Isaac Sim, Isaac Lab)
Standardized device interface for XR headsets, gloves, foot pedals, body trackers
Flexible retargeting to different robot embodiments
Plugin system for adding new devices and use cases
Visualization module (Televiz) for streaming robot camera and sensor feeds, plus 3D reconstruction content to XR headsets
Markerless hand reconstruction from egocentric video into 4D hand and camera poses (monocular supported, stereo on the roadmap)
Tip
Just want to get running? Follow the Quick Start how-to guide for installation and first-run steps.
Table of Contents#
Overview
Getting Started