warp.sim#
Deprecated since version v1.8: warp.sim will be replaced by the upcoming Newton library,
which will be released as a separate package with a new API.
Please note that migrating will require code changes. A guide will be provided in the future.
For more details, see the announcement on GitHub.
Warp includes a simulation module warp.sim that includes many common physical simulation models and integrators
for explicit and implicit time-stepping.
Model#
- class warp.sim.ModelBuilder(up_vector=(0.0, 1.0, 0.0), gravity=-9.80665)[source]#
A helper class for building simulation models at runtime.
Use the ModelBuilder to construct a simulation scene. The ModelBuilder and builds the scene representation using standard Python data structures (lists), this means it is not differentiable. Once
finalize()has been called the ModelBuilder transfers all data to Warp tensors and returns an object that may be used for simulation.Example
import warp as wp import warp.sim builder = wp.sim.ModelBuilder() # anchor point (zero mass) builder.add_particle((0, 1.0, 0.0), (0.0, 0.0, 0.0), 0.0) # build chain for i in range(1, 10): builder.add_particle((i, 1.0, 0.0), (0.0, 0.0, 0.0), 1.0) builder.add_spring(i - 1, i, 1.0e3, 0.0, 0) # create model model = builder.finalize("cuda") state = model.state() control = model.control() # optional, to support time-varying control inputs integrator = wp.sim.SemiImplicitIntegrator() for i in range(100): state.clear_forces() integrator.simulate(model, state, state, dt=1.0 / 60.0, control=control)
Note
It is strongly recommended to use the ModelBuilder to construct a simulation rather than creating your own Model object directly, however it is possible to do so if desired.
- default_particle_radius = 0.1#
- default_tri_ke = 100.0#
- default_tri_ka = 100.0#
- default_tri_kd = 10.0#
- default_tri_drag = 0.0#
- default_tri_lift = 0.0#
- default_spring_ke = 100.0#
- default_spring_kd = 0.0#
- default_edge_ke = 100.0#
- default_edge_kd = 0.0#
- default_shape_ke = 100000.0#
- default_shape_kd = 1000.0#
- default_shape_kf = 1000.0#
- default_shape_ka = 0.0#
- default_shape_mu = 0.5#
- default_shape_restitution = 0.0#
- default_shape_density = 1000.0#
- default_shape_thickness = 1e-05#
- default_joint_limit_ke = 100.0#
- default_joint_limit_kd = 1.0#
- add_builder(
- builder,
- xform=None,
- update_num_env_count=True,
- separate_collision_group=True,
Copies the data from builder, another ModelBuilder to this ModelBuilder.
- Parameters:
builder (ModelBuilder) – a model builder to add model data from.
xform (transform) – offset transform applied to root bodies.
update_num_env_count (bool) – if True, the number of environments is incremented by 1.
separate_collision_group (bool) – if True, the shapes from the articulations in builder will all be put into a single new collision group, otherwise, only the shapes in collision group > -1 will be moved to a new group.
- add_body(
- origin=None,
- armature=0.0,
- com=None,
- I_m=None,
- m=0.0,
- name=None,
Adds a rigid body to the model.
- Parameters:
origin (Tuple[List[float], List[float]] | None) – The location of the body in the world frame
armature (float) – Artificial inertia added to the body
com (List[float] | None) – The center of mass of the body w.r.t its origin
I_m (List[float] | None) – The 3x3 inertia tensor of the body (specified relative to the center of mass)
m (float) – Mass of the body
name (str | None) – Name of the body (optional)
- Returns:
The index of the body in the model
- Return type:
Note
If the mass (m) is zero then the body is treated as kinematic with no dynamics
- add_joint(
- joint_type,
- parent,
- child,
- linear_axes=None,
- angular_axes=None,
- name=None,
- parent_xform=None,
- child_xform=None,
- linear_compliance=0.0,
- angular_compliance=0.0,
- armature=1e-2,
- collision_filter_parent=True,
- enabled=True,
Generic method to add any type of joint to this ModelBuilder.
- Parameters:
joint_type (constant) – The type of joint to add (see Joint types)
parent (int) – The index of the parent body (-1 is the world)
child (int) – The index of the child body
linear_axes (list(
JointAxis)) – The linear axes (seeJointAxis) of the jointangular_axes (list(
JointAxis)) – The angular axes (seeJointAxis) of the jointname (str) – The name of the joint (optional)
parent_xform (transform) – The transform of the joint in the parent body’s local frame
child_xform (transform) – The transform of the joint in the child body’s local frame
linear_compliance (float) – The linear compliance of the joint
angular_compliance (float) – The angular compliance of the joint
armature (float) – Artificial inertia added around the joint axes (only considered by
FeatherstoneIntegrator)collision_filter_parent (bool) – Whether to filter collisions between shapes of the parent and child bodies
enabled (bool) – Whether the joint is enabled (not considered by
FeatherstoneIntegrator)
- Returns:
The index of the added joint
- Return type:
- add_joint_revolute(
- parent,
- child,
- parent_xform=None,
- child_xform=None,
- axis=(1.0, 0.0, 0.0),
- target=None,
- target_ke=0.0,
- target_kd=0.0,
- mode=JOINT_MODE_FORCE,
- limit_lower=-2 * math.pi,
- limit_upper=2 * math.pi,
- limit_ke=None,
- limit_kd=None,
- linear_compliance=0.0,
- angular_compliance=0.0,
- armature=1e-2,
- name=None,
- collision_filter_parent=True,
- enabled=True,
Adds a revolute (hinge) joint to the model. It has one degree of freedom.
- Parameters:
parent (int) – The index of the parent body
child (int) – The index of the child body
parent_xform (transform) – The transform of the joint in the parent body’s local frame
child_xform (transform) – The transform of the joint in the child body’s local frame
axis (3D vector or JointAxis) – The axis of rotation in the parent body’s local frame, can be a JointAxis object whose settings will be used instead of the other arguments
target (float | None) – The target angle (in radians) or target velocity of the joint (if None, the joint is considered to be in force control mode)
target_ke (float) – The stiffness of the joint target
target_kd (float) – The damping of the joint target
limit_lower (float) – The lower limit of the joint
limit_upper (float) – The upper limit of the joint
limit_ke (float | None) – The stiffness of the joint limit (None to use the default value
default_joint_limit_ke)limit_kd (float | None) – The damping of the joint limit (None to use the default value
default_joint_limit_kd)linear_compliance (float) – The linear compliance of the joint
angular_compliance (float) – The angular compliance of the joint
armature (float) – Artificial inertia added around the joint axis
name (str | None) – The name of the joint
collision_filter_parent (bool) – Whether to filter collisions between shapes of the parent and child bodies
enabled (bool) – Whether the joint is enabled
mode (int)
- Returns:
The index of the added joint
- Return type:
- add_joint_prismatic(
- parent,
- child,
- parent_xform=None,
- child_xform=None,
- axis=(1.0, 0.0, 0.0),
- target=None,
- target_ke=0.0,
- target_kd=0.0,
- mode=JOINT_MODE_FORCE,
- limit_lower=-1e4,
- limit_upper=1e4,
- limit_ke=None,
- limit_kd=None,
- linear_compliance=0.0,
- angular_compliance=0.0,
- armature=1e-2,
- name=None,
- collision_filter_parent=True,
- enabled=True,
Adds a prismatic (sliding) joint to the model. It has one degree of freedom.
- Parameters:
parent (int) – The index of the parent body
child (int) – The index of the child body
parent_xform (transform) – The transform of the joint in the parent body’s local frame
child_xform (transform) – The transform of the joint in the child body’s local frame
axis (3D vector or JointAxis) – The axis of rotation in the parent body’s local frame, can be a JointAxis object whose settings will be used instead of the other arguments
target (float | None) – The target position or velocity of the joint (if None, the joint is considered to be in force control mode)
target_ke (float) – The stiffness of the joint target
target_kd (float) – The damping of the joint target
limit_lower (float) – The lower limit of the joint
limit_upper (float) – The upper limit of the joint
limit_ke (float | None) – The stiffness of the joint limit (None to use the default value
default_joint_limit_ke)limit_kd (float | None) – The damping of the joint limit (None to use the default value
default_joint_limit_ke)linear_compliance (float) – The linear compliance of the joint
angular_compliance (float) – The angular compliance of the joint
armature (float) – Artificial inertia added around the joint axis
name (str | None) – The name of the joint
collision_filter_parent (bool) – Whether to filter collisions between shapes of the parent and child bodies
enabled (bool) – Whether the joint is enabled
mode (int)
- Returns:
The index of the added joint
- Return type:
- add_joint_ball(
- parent,
- child,
- parent_xform=None,
- child_xform=None,
- linear_compliance=0.0,
- angular_compliance=0.0,
- armature=1e-2,
- name=None,
- collision_filter_parent=True,
- enabled=True,
Adds a ball (spherical) joint to the model. Its position is defined by a 4D quaternion (xyzw) and its velocity is a 3D vector.
- Parameters:
parent (int) – The index of the parent body
child (int) – The index of the child body
parent_xform (transform) – The transform of the joint in the parent body’s local frame
child_xform (transform) – The transform of the joint in the child body’s local frame
linear_compliance (float) – The linear compliance of the joint
angular_compliance (float) – The angular compliance of the joint
armature (float) – Artificial inertia added around the joint axis (only considered by FeatherstoneIntegrator)
name (str | None) – The name of the joint
collision_filter_parent (bool) – Whether to filter collisions between shapes of the parent and child bodies
enabled (bool) – Whether the joint is enabled
- Returns:
The index of the added joint
- Return type:
- add_joint_fixed(
- parent,
- child,
- parent_xform=None,
- child_xform=None,
- linear_compliance=0.0,
- angular_compliance=0.0,
- armature=1e-2,
- name=None,
- collision_filter_parent=True,
- enabled=True,
Adds a fixed (static) joint to the model. It has no degrees of freedom. See
collapse_fixed_joints()for a helper function that removes these fixed joints and merges the connecting bodies to simplify the model and improve stability.- Parameters:
parent (int) – The index of the parent body
child (int) – The index of the child body
parent_xform (transform) – The transform of the joint in the parent body’s local frame
child_xform (transform) – The transform of the joint in the child body’s local frame
linear_compliance (float) – The linear compliance of the joint
angular_compliance (float) – The angular compliance of the joint
armature (float) – Artificial inertia added around the joint axis (only considered by FeatherstoneIntegrator)
name (str | None) – The name of the joint
collision_filter_parent (bool) – Whether to filter collisions between shapes of the parent and child bodies
enabled (bool) – Whether the joint is enabled
- Returns:
The index of the added joint
- Return type:
- add_joint_free(
- child,
- parent_xform=None,
- child_xform=None,
- armature=0.0,
- parent=-1,
- name=None,
- collision_filter_parent=True,
- enabled=True,
Adds a free joint to the model. It has 7 positional degrees of freedom (first 3 linear and then 4 angular dimensions for the orientation quaternion in xyzw notation) and 6 velocity degrees of freedom (first 3 angular and then 3 linear velocity dimensions).
- Parameters:
child (int) – The index of the child body
parent_xform (transform) – The transform of the joint in the parent body’s local frame
child_xform (transform) – The transform of the joint in the child body’s local frame
armature (float) – Artificial inertia added around the joint axis (only considered by FeatherstoneIntegrator)
parent (int) – The index of the parent body (-1 by default to use the world frame, e.g. to make the child body and its children a floating-base mechanism)
name (str | None) – The name of the joint
collision_filter_parent (bool) – Whether to filter collisions between shapes of the parent and child bodies
enabled (bool) – Whether the joint is enabled
- Returns:
The index of the added joint
- Return type:
- add_joint_distance(
- parent,
- child,
- parent_xform=None,
- child_xform=None,
- min_distance=-1.0,
- max_distance=1.0,
- compliance=0.0,
- collision_filter_parent=True,
- enabled=True,
Adds a distance joint to the model. The distance joint constraints the distance between the joint anchor points on the two bodies (see Forward / Inverse Kinematics) it connects to the interval [min_distance, max_distance]. It has 7 positional degrees of freedom (first 3 linear and then 4 angular dimensions for the orientation quaternion in xyzw notation) and 6 velocity degrees of freedom (first 3 angular and then 3 linear velocity dimensions).
- Parameters:
parent (int) – The index of the parent body
child (int) – The index of the child body
parent_xform (transform) – The transform of the joint in the parent body’s local frame
child_xform (transform) – The transform of the joint in the child body’s local frame
min_distance (float) – The minimum distance between the bodies (no limit if negative)
max_distance (float) – The maximum distance between the bodies (no limit if negative)
compliance (float) – The compliance of the joint
collision_filter_parent (bool) – Whether to filter collisions between shapes of the parent and child bodies
enabled (bool) – Whether the joint is enabled
- Returns:
The index of the added joint
- Return type:
Note
Distance joints are currently only supported in the
XPBDIntegratorat the moment.
- add_joint_universal(
- parent,
- child,
- axis_0,
- axis_1,
- parent_xform=None,
- child_xform=None,
- linear_compliance=0.0,
- angular_compliance=0.0,
- armature=1e-2,
- name=None,
- collision_filter_parent=True,
- enabled=True,
Adds a universal joint to the model. U-joints have two degrees of freedom, one for each axis.
- Parameters:
parent (int) – The index of the parent body
child (int) – The index of the child body
axis_0 (3D vector or JointAxis) – The first axis of the joint, can be a JointAxis object whose settings will be used instead of the other arguments
axis_1 (3D vector or JointAxis) – The second axis of the joint, can be a JointAxis object whose settings will be used instead of the other arguments
parent_xform (transform) – The transform of the joint in the parent body’s local frame
child_xform (transform) – The transform of the joint in the child body’s local frame
linear_compliance (float) – The linear compliance of the joint
angular_compliance (float) – The angular compliance of the joint
armature (float) – Artificial inertia added around the joint axes
name (str | None) – The name of the joint
collision_filter_parent (bool) – Whether to filter collisions between shapes of the parent and child bodies
enabled (bool) – Whether the joint is enabled
- Returns:
The index of the added joint
- Return type:
- add_joint_compound(
- parent,
- child,
- axis_0,
- axis_1,
- axis_2,
- parent_xform=None,
- child_xform=None,
- linear_compliance=0.0,
- angular_compliance=0.0,
- armature=1e-2,
- name=None,
- collision_filter_parent=True,
- enabled=True,
Adds a compound joint to the model, which has 3 degrees of freedom, one for each axis. Similar to the ball joint (see
add_ball_joint()), the compound joint allows bodies to move in a 3D rotation relative to each other, except that the rotation is defined by 3 axes instead of a quaternion. Depending on the choice of axes, the orientation can be specified through Euler angles, e.g. z-x-z or x-y-x, or through a Tait-Bryan angle sequence, e.g. z-y-x or x-y-z.- Parameters:
parent (int) – The index of the parent body
child (int) – The index of the child body
axis_0 (3D vector or JointAxis) – The first axis of the joint, can be a JointAxis object whose settings will be used instead of the other arguments
axis_1 (3D vector or JointAxis) – The second axis of the joint, can be a JointAxis object whose settings will be used instead of the other arguments
axis_2 (3D vector or JointAxis) – The third axis of the joint, can be a JointAxis object whose settings will be used instead of the other arguments
parent_xform (transform) – The transform of the joint in the parent body’s local frame
child_xform (transform) – The transform of the joint in the child body’s local frame
linear_compliance (float) – The linear compliance of the joint
angular_compliance (float) – The angular compliance of the joint
armature (float) – Artificial inertia added around the joint axes
name (str | None) – The name of the joint
collision_filter_parent (bool) – Whether to filter collisions between shapes of the parent and child bodies
enabled (bool) – Whether the joint is enabled
- Returns:
The index of the added joint
- Return type:
- add_joint_d6(
- parent,
- child,
- linear_axes=None,
- angular_axes=None,
- name=None,
- parent_xform=None,
- child_xform=None,
- linear_compliance=0.0,
- angular_compliance=0.0,
- armature=1e-2,
- collision_filter_parent=True,
- enabled=True,
Adds a generic joint with custom linear and angular axes. The number of axes determines the number of degrees of freedom of the joint.
- Parameters:
parent (int) – The index of the parent body
child (int) – The index of the child body
linear_axes (list[JointAxis] | None) – A list of linear axes
angular_axes (list[JointAxis] | None) – A list of angular axes
name (str | None) – The name of the joint
parent_xform (transform) – The transform of the joint in the parent body’s local frame
child_xform (transform) – The transform of the joint in the child body’s local frame
linear_compliance (float) – The linear compliance of the joint
angular_compliance (float) – The angular compliance of the joint
armature (float) – Artificial inertia added around the joint axes
collision_filter_parent (bool) – Whether to filter collisions between shapes of the parent and child bodies
enabled (bool) – Whether the joint is enabled
- Returns:
The index of the added joint
- plot_articulation(
- show_body_names=True,
- show_joint_names=True,
- show_joint_types=True,
- plot_shapes=True,
- show_shape_types=True,
- show_legend=True,
Visualizes the model’s articulation graph using matplotlib and networkx. Uses the spring layout algorithm from networkx to arrange the nodes. Bodies are shown as orange squares, shapes are shown as blue circles.
- Parameters:
show_body_names (bool) – Whether to show the body names or indices
show_joint_names (bool) – Whether to show the joint names or indices
show_joint_types (bool) – Whether to show the joint types
plot_shapes (bool) – Whether to render the shapes connected to the rigid bodies
show_shape_types (bool) – Whether to show the shape geometry types
show_legend (bool) – Whether to show a legend
- collapse_fixed_joints(verbose=wp.config.verbose)[source]#
Removes fixed joints from the model and merges the bodies they connect. This is useful for simplifying the model for faster and more stable simulation.
- add_muscle(bodies, positions, f0, lm, lt, lmax, pen)[source]#
Adds a muscle-tendon activation unit.
- Parameters:
- Returns:
The index of the muscle in the model
- Return type:
Note
The simulation support for muscles is in progress and not yet fully functional.
- add_shape_plane(
- plane=(0.0, 1.0, 0.0, 0.0),
- pos=None,
- rot=None,
- width=10.0,
- length=10.0,
- body=-1,
- ke=None,
- kd=None,
- kf=None,
- ka=None,
- mu=None,
- restitution=None,
- thickness=None,
- has_ground_collision=False,
- has_shape_collision=True,
- is_visible=True,
- collision_group=-1,
Add a plane collision shape.
If
posandrotare defined, the plane is assumed to have its normal as (0, 1, 0). Otherwise, the plane equation defined through theplaneargument is used.- Parameters:
plane (List[float] | tuple[float, float, float, float]) – The plane equation in form a*x + b*y + c*z + d = 0
pos (List[float] | None) – The position of the plane in world coordinates
rot (List[float] | None) – The rotation of the plane in world coordinates
width (float) – The extent along x of the plane (infinite if 0)
length (float) – The extent along z of the plane (infinite if 0)
body (int) – The body index to attach the shape to (-1 by default to keep the plane static)
ke (float | None) – The contact elastic stiffness (None to use the default value
default_shape_ke)kd (float | None) – The contact damping stiffness (None to use the default value
default_shape_kd)kf (float | None) – The contact friction stiffness (None to use the default value
default_shape_kf)ka (float | None) – The contact adhesion distance (None to use the default value
default_shape_ka)mu (float | None) – The coefficient of friction (None to use the default value
default_shape_mu)restitution (float | None) – The coefficient of restitution (None to use the default value
default_shape_restitution)thickness (float | None) – The thickness of the plane (0 by default) for collision handling (None to use the default value
default_shape_thickness)has_ground_collision (bool) – If True, the shape will collide with the ground plane if Model.ground is True
has_shape_collision (bool) – If True, the shape will collide with other shapes
is_visible (bool) – Whether the plane is visible
collision_group (int) – The collision group of the shape
- Returns:
The index of the added shape
- Return type:
- add_shape_sphere(
- body,
- pos=(0.0, 0.0, 0.0),
- rot=(0.0, 0.0, 0.0, 1.0),
- radius=1.0,
- density=None,
- ke=None,
- kd=None,
- kf=None,
- ka=None,
- mu=None,
- restitution=None,
- is_solid=True,
- thickness=None,
- has_ground_collision=True,
- has_shape_collision=True,
- collision_group=-1,
- is_visible=True,
Add a sphere collision shape to a body.
- Parameters:
body – The index of the parent body this shape belongs to (use -1 for static shapes)
pos (List[float] | tuple[float, float, float]) – The location of the shape with respect to the parent frame
rot (List[float] | tuple[float, float, float, float]) – The rotation of the shape with respect to the parent frame
radius (float) – The radius of the sphere
density (float | None) – The density of the shape (None to use the default value
default_shape_density)ke (float | None) – The contact elastic stiffness (None to use the default value
default_shape_ke)kd (float | None) – The contact damping stiffness (None to use the default value
default_shape_kd)kf (float | None) – The contact friction stiffness (None to use the default value
default_shape_kf)ka (float | None) – The contact adhesion distance (None to use the default value
default_shape_ka)mu (float | None) – The coefficient of friction (None to use the default value
default_shape_mu)restitution (float | None) – The coefficient of restitution (None to use the default value
default_shape_restitution)is_solid (bool) – Whether the sphere is solid or hollow
thickness (float | None) – Thickness to use for computing inertia of a hollow sphere, and for collision handling (None to use the default value
default_shape_thickness)has_ground_collision (bool) – If True, the shape will collide with the ground plane if Model.ground is True
has_shape_collision (bool) – If True, the shape will collide with other shapes
collision_group (int) – The collision group of the shape
is_visible (bool) – Whether the sphere is visible
- Returns:
The index of the added shape
- Return type:
- add_shape_box(
- body,
- pos=(0.0, 0.0, 0.0),
- rot=(0.0, 0.0, 0.0, 1.0),
- hx=0.5,
- hy=0.5,
- hz=0.5,
- density=None,
- ke=None,
- kd=None,
- kf=None,
- ka=None,
- mu=None,
- restitution=None,
- is_solid=True,
- thickness=None,
- has_ground_collision=True,
- has_shape_collision=True,
- collision_group=-1,
- is_visible=True,
Add a box collision shape to a body.
- Parameters:
body (int) – The index of the parent body this shape belongs to (use -1 for static shapes)
pos (List[float] | tuple[float, float, float]) – The location of the shape with respect to the parent frame
rot (List[float] | tuple[float, float, float, float]) – The rotation of the shape with respect to the parent frame
hx (float) – The half-extent along the x-axis
hy (float) – The half-extent along the y-axis
hz (float) – The half-extent along the z-axis
density (float | None) – The density of the shape (None to use the default value
default_shape_density)ke (float | None) – The contact elastic stiffness (None to use the default value
default_shape_ke)kd (float | None) – The contact damping stiffness (None to use the default value
default_shape_kd)kf (float | None) – The contact friction stiffness (None to use the default value
default_shape_kf)ka (float | None) – The contact adhesion distance (None to use the default value
default_shape_ka)mu (float | None) – The coefficient of friction (None to use the default value
default_shape_mu)restitution (float | None) – The coefficient of restitution (None to use the default value
default_shape_restitution)is_solid (bool) – Whether the box is solid or hollow
thickness (float | None) – Thickness to use for computing inertia of a hollow box, and for collision handling (None to use the default value
default_shape_thickness)has_ground_collision (bool) – If True, the shape will collide with the ground plane if Model.ground is True
has_shape_collision (bool) – If True, the shape will collide with other shapes
collision_group (int) – The collision group of the shape
is_visible (bool) – Whether the box is visible
- Returns:
The index of the added shape
- Return type:
- add_shape_capsule(
- body,
- pos=(0.0, 0.0, 0.0),
- rot=(0.0, 0.0, 0.0, 1.0),
- radius=1.0,
- half_height=0.5,
- up_axis=1,
- density=None,
- ke=None,
- kd=None,
- kf=None,
- ka=None,
- mu=None,
- restitution=None,
- is_solid=True,
- thickness=None,
- has_ground_collision=True,
- has_shape_collision=True,
- collision_group=-1,
- is_visible=True,
Add a capsule collision shape to a body.
- Parameters:
body (int) – The index of the parent body this shape belongs to (use -1 for static shapes)
pos (List[float] | tuple[float, float, float]) – The location of the shape with respect to the parent frame
rot (List[float] | tuple[float, float, float, float]) – The rotation of the shape with respect to the parent frame
radius (float) – The radius of the capsule
half_height (float) – The half length of the center cylinder along the up axis
up_axis (int) – The axis along which the capsule is aligned (0=x, 1=y, 2=z)
density (float | None) – The density of the shape (None to use the default value
default_shape_density)ke (float | None) – The contact elastic stiffness (None to use the default value
default_shape_ke)kd (float | None) – The contact damping stiffness (None to use the default value
default_shape_kd)kf (float | None) – The contact friction stiffness (None to use the default value
default_shape_kf)ka (float | None) – The contact adhesion distance (None to use the default value
default_shape_ka)mu (float | None) – The coefficient of friction (None to use the default value
default_shape_mu)restitution (float | None) – The coefficient of restitution (None to use the default value
default_shape_restitution)is_solid (bool) – Whether the capsule is solid or hollow
thickness (float | None) – Thickness to use for computing inertia of a hollow capsule, and for collision handling (None to use the default value
default_shape_thickness)has_ground_collision (bool) – If True, the shape will collide with the ground plane if Model.ground is True
has_shape_collision (bool) – If True, the shape will collide with other shapes
collision_group (int) – The collision group of the shape
is_visible (bool) – Whether the capsule is visible
- Returns:
The index of the added shape
- Return type:
- add_shape_cylinder(
- body,
- pos=(0.0, 0.0, 0.0),
- rot=(0.0, 0.0, 0.0, 1.0),
- radius=1.0,
- half_height=0.5,
- up_axis=1,
- density=None,
- ke=None,
- kd=None,
- kf=None,
- ka=None,
- mu=None,
- restitution=None,
- is_solid=True,
- thickness=None,
- has_ground_collision=True,
- has_shape_collision=True,
- collision_group=-1,
- is_visible=True,
Add a cylinder collision shape to a body.
- Parameters:
body (int) – The index of the parent body this shape belongs to (use -1 for static shapes)
pos (List[float] | tuple[float, float, float]) – The location of the shape with respect to the parent frame
rot (List[float] | tuple[float, float, float, float]) – The rotation of the shape with respect to the parent frame
radius (float) – The radius of the cylinder
half_height (float) – The half length of the cylinder along the up axis
up_axis (int) – The axis along which the cylinder is aligned (0=x, 1=y, 2=z)
density (float | None) – The density of the shape (None to use the default value
default_shape_density)ke (float | None) – The contact elastic stiffness (None to use the default value
default_shape_ke)kd (float | None) – The contact damping stiffness (None to use the default value
default_shape_kd)kf (float | None) – The contact friction stiffness (None to use the default value
default_shape_kf)ka (float | None) – The contact adhesion distance (None to use the default value
default_shape_ka)mu (float | None) – The coefficient of friction (None to use the default value
default_shape_mu)restitution (float | None) – The coefficient of restitution (None to use the default value
default_shape_restitution)is_solid (bool) – Whether the cylinder is solid or hollow
thickness (float | None) – Thickness to use for computing inertia of a hollow cylinder, and for collision handling (None to use the default value
default_shape_thickness)has_ground_collision (bool) – If True, the shape will collide with the ground plane if Model.ground is True
has_shape_collision (bool) – If True, the shape will collide with other shapes
collision_group (int) – The collision group of the shape
is_visible (bool) – Whether the cylinder is visible
- Return type:
Note
Cylinders are currently not supported in rigid body collision handling.
- Returns:
The index of the added shape
- Parameters:
body (int)
radius (float)
half_height (float)
up_axis (int)
density (float | None)
ke (float | None)
kd (float | None)
kf (float | None)
ka (float | None)
mu (float | None)
restitution (float | None)
is_solid (bool)
thickness (float | None)
has_ground_collision (bool)
has_shape_collision (bool)
collision_group (int)
is_visible (bool)
- Return type:
- add_shape_cone(
- body,
- pos=(0.0, 0.0, 0.0),
- rot=(0.0, 0.0, 0.0, 1.0),
- radius=1.0,
- half_height=0.5,
- up_axis=1,
- density=None,
- ke=None,
- kd=None,
- kf=None,
- ka=None,
- mu=None,
- restitution=None,
- is_solid=True,
- thickness=None,
- has_ground_collision=True,
- has_shape_collision=True,
- collision_group=-1,
- is_visible=True,
Add a cone collision shape to a body.
- Parameters:
body (int) – The index of the parent body this shape belongs to (use -1 for static shapes)
pos (List[float] | tuple[float, float, float]) – The location of the shape with respect to the parent frame
rot (List[float] | tuple[float, float, float, float]) – The rotation of the shape with respect to the parent frame
radius (float) – The radius of the cone
half_height (float) – The half length of the cone along the up axis
up_axis (int) – The axis along which the cone is aligned (0=x, 1=y, 2=z)
density (float | None) – The density of the shape (None to use the default value
default_shape_density)ke (float | None) – The contact elastic stiffness (None to use the default value
default_shape_ke)kd (float | None) – The contact damping stiffness (None to use the default value
default_shape_kd)kf (float | None) – The contact friction stiffness (None to use the default value
default_shape_kf)ka (float | None) – The contact adhesion distance (None to use the default value
default_shape_ka)mu (float | None) – The coefficient of friction (None to use the default value
default_shape_mu)restitution (float | None) – The coefficient of restitution (None to use the default value
default_shape_restitution)is_solid (bool) – Whether the cone is solid or hollow
thickness (float | None) – Thickness to use for computing inertia of a hollow cone, and for collision handling (None to use the default value
default_shape_thickness)has_ground_collision (bool) – If True, the shape will collide with the ground plane if Model.ground is True
has_shape_collision (bool) – If True, the shape will collide with other shapes
collision_group (int) – The collision group of the shape
is_visible (bool) – Whether the cone is visible
- Return type:
Note
Cones are currently not supported in rigid body collision handling.
- Returns:
The index of the added shape
- Parameters:
body (int)
radius (float)
half_height (float)
up_axis (int)
density (float | None)
ke (float | None)
kd (float | None)
kf (float | None)
ka (float | None)
mu (float | None)
restitution (float | None)
is_solid (bool)
thickness (float | None)
has_ground_collision (bool)
has_shape_collision (bool)
collision_group (int)
is_visible (bool)
- Return type:
- add_shape_mesh(
- body,
- pos=None,
- rot=None,
- mesh=None,
- scale=None,
- density=None,
- ke=None,
- kd=None,
- kf=None,
- ka=None,
- mu=None,
- restitution=None,
- is_solid=True,
- thickness=None,
- has_ground_collision=True,
- has_shape_collision=True,
- collision_group=-1,
- is_visible=True,
Add a triangle mesh collision shape to a body.
- Parameters:
body (int) – The index of the parent body this shape belongs to (use -1 for static shapes)
pos (List[float] | None) – The location of the shape with respect to the parent frame (None to use the default value
wp.vec3(0.0, 0.0, 0.0))rot (List[float] | None) – The rotation of the shape with respect to the parent frame (None to use the default value
wp.quat(0.0, 0.0, 0.0, 1.0))mesh (Mesh | None) – The mesh object
scale (List[float] | None) – Scale to use for the collider. (None to use the default value
wp.vec3(1.0, 1.0, 1.0))density (float | None) – The density of the shape (None to use the default value
default_shape_density)ke (float | None) – The contact elastic stiffness (None to use the default value
default_shape_ke)kd (float | None) – The contact damping stiffness (None to use the default value
default_shape_kd)kf (float | None) – The contact friction stiffness (None to use the default value
default_shape_kf)ka (float | None) – The contact adhesion distance (None to use the default value
default_shape_ka)mu (float | None) – The coefficient of friction (None to use the default value
default_shape_mu)restitution (float | None) – The coefficient of restitution (None to use the default value
default_shape_restitution)is_solid (bool) – If True, the mesh is solid, otherwise it is a hollow surface with the given wall thickness
thickness (float | None) – Thickness to use for computing inertia of a hollow mesh, and for collision handling (None to use the default value
default_shape_thickness)has_ground_collision (bool) – If True, the shape will collide with the ground plane if Model.ground is True
has_shape_collision (bool) – If True, the shape will collide with other shapes
collision_group (int) – The collision group of the shape
is_visible (bool) – Whether the mesh is visible
- Returns:
The index of the added shape
- Return type:
- add_shape_sdf(
- body,
- pos=(0.0, 0.0, 0.0),
- rot=(0.0, 0.0, 0.0, 1.0),
- sdf=None,
- scale=(1.0, 1.0, 1.0),
- density=None,
- ke=None,
- kd=None,
- kf=None,
- ka=None,
- mu=None,
- restitution=None,
- is_solid=True,
- thickness=None,
- has_ground_collision=True,
- has_shape_collision=True,
- collision_group=-1,
- is_visible=True,
Add a SDF collision shape to a body.
- Parameters:
body (int) – The index of the parent body this shape belongs to (use -1 for static shapes)
pos (List[float] | tuple[float, float, float]) – The location of the shape with respect to the parent frame
rot (List[float] | tuple[float, float, float, float]) – The rotation of the shape with respect to the parent frame
sdf (SDF | None) – The sdf object
scale (List[float] | tuple[float, float, float]) – Scale to use for the collider
density (float | None) – The density of the shape (None to use the default value
default_shape_density)ke (float | None) – The contact elastic stiffness (None to use the default value
default_shape_ke)kd (float | None) – The contact damping stiffness (None to use the default value
default_shape_kd)kf (float | None) – The contact friction stiffness (None to use the default value
default_shape_kf)ka (float | None) – The contact adhesion distance (None to use the default value
default_shape_ka)mu (float | None) – The coefficient of friction (None to use the default value
default_shape_mu)restitution (float | None) – The coefficient of restitution (None to use the default value
default_shape_restitution)is_solid (bool) – If True, the SDF is solid, otherwise it is a hollow surface with the given wall thickness
thickness (float | None) – Thickness to use for collision handling (None to use the default value
default_shape_thickness)has_ground_collision (bool) – If True, the shape will collide with the ground plane if Model.ground is True
has_shape_collision (bool) – If True, the shape will collide with other shapes
collision_group (int) – The collision group of the shape
is_visible (bool) – Whether the shape is visible
- Returns:
The index of the added shape
- Return type:
- add_particle(
- pos,
- vel,
- mass,
- radius=None,
- flags=PARTICLE_FLAG_ACTIVE,
Adds a single particle to the model
- Parameters:
mass (float) – The mass of the particle
radius (float | None) – The radius of the particle used in collision handling. If None, the radius is set to the default value (
default_particle_radius).flags (uint32) – The flags that control the dynamical behavior of the particle, see PARTICLE_FLAG_* constants
- Return type:
Note
Set the mass equal to zero to create a ‘kinematic’ particle that does is not subject to dynamics.
- add_spring(i, j, ke, kd, control)[source]#
Adds a spring between two particles in the system
- Parameters:
Note
The spring is created with a rest-length based on the distance between the particles in their initial configuration.
- add_triangle(
- i,
- j,
- k,
- tri_ke=None,
- tri_ka=None,
- tri_kd=None,
- tri_drag=None,
- tri_lift=None,
Adds a triangular FEM element between three particles in the system.
Triangles are modeled as viscoelastic elements with elastic stiffness and damping parameters specified on the model. See model.tri_ke, model.tri_kd.
- Parameters:
- Returns:
The area of the triangle
- Return type:
Note
The triangle is created with a rest-length based on the distance between the particles in their initial configuration.
- add_triangles(
- i,
- j,
- k,
- tri_ke=None,
- tri_ka=None,
- tri_kd=None,
- tri_drag=None,
- tri_lift=None,
Adds triangular FEM elements between groups of three particles in the system.
Triangles are modeled as viscoelastic elements with elastic stiffness and damping Parameters specified on the model. See model.tri_ke, model.tri_kd.
- Parameters:
- Returns:
The areas of the triangles
- Return type:
Note
A triangle is created with a rest-length based on the distance between the particles in their initial configuration.
- add_tetrahedron(
- i,
- j,
- k,
- l,
- k_mu=1.0e3,
- k_lambda=1.0e3,
- k_damp=0.0,
Adds a tetrahedral FEM element between four particles in the system.
Tetrahedra are modeled as viscoelastic elements with a NeoHookean energy density based on [Smith et al. 2018].
- Parameters:
i (int) – The index of the first particle
j (int) – The index of the second particle
k (int) – The index of the third particle
l (int) – The index of the fourth particle
k_mu (float) – The first elastic Lame parameter
k_lambda (float) – The second elastic Lame parameter
k_damp (float) – The element’s damping stiffness
- Returns:
The volume of the tetrahedron
- Return type:
Note
The tetrahedron is created with a rest-pose based on the particle’s initial configuration
- add_edge(
- i,
- j,
- k,
- l,
- rest=None,
- edge_ke=None,
- edge_kd=None,
Adds a bending edge element between four particles in the system.
Bending elements are designed to be between two connected triangles. Then bending energy is based of [Bridson et al. 2002]. Bending stiffness is controlled by the model.tri_kb parameter.
- Parameters:
i (int) – The index of the first particle, i.e., opposite vertex 0
j (int) – The index of the second particle, i.e., opposite vertex 1
k (int) – The index of the third particle, i.e., vertex 0
l (int) – The index of the fourth particle, i.e., vertex 1
rest (float | None) – The rest angle across the edge in radians, if not specified it will be computed
edge_ke (float | None)
edge_kd (float | None)
- Return type:
None
Note
The edge lies between the particles indexed by ‘k’ and ‘l’ parameters with the opposing vertices indexed by ‘i’ and ‘j’. This defines two connected triangles with counter clockwise winding: (i, k, l), (j, l, k).
- add_edges(
- i,
- j,
- k,
- l,
- rest=None,
- edge_ke=None,
- edge_kd=None,
Adds bending edge elements between groups of four particles in the system.
Bending elements are designed to be between two connected triangles. Then bending energy is based of [Bridson et al. 2002]. Bending stiffness is controlled by the model.tri_kb parameter.
- Parameters:
i – The index of the first particle, i.e., opposite vertex 0
j – The index of the second particle, i.e., opposite vertex 1
k – The index of the third particle, i.e., vertex 0
l – The index of the fourth particle, i.e., vertex 1
rest (list[float] | None) – The rest angles across the edges in radians, if not specified they will be computed
- Return type:
None
Note
The edge lies between the particles indexed by ‘k’ and ‘l’ parameters with the opposing vertices indexed by ‘i’ and ‘j’. This defines two connected triangles with counter clockwise winding: (i, k, l), (j, l, k).
- add_cloth_grid(
- pos,
- rot,
- vel,
- dim_x,
- dim_y,
- cell_x,
- cell_y,
- mass,
- reverse_winding=False,
- fix_left=False,
- fix_right=False,
- fix_top=False,
- fix_bottom=False,
- tri_ke=None,
- tri_ka=None,
- tri_kd=None,
- tri_drag=None,
- tri_lift=None,
- edge_ke=None,
- edge_kd=None,
- add_springs=False,
- spring_ke=None,
- spring_kd=None,
- particle_radius=None,
Helper to create a regular planar cloth grid
Creates a rectangular grid of particles with FEM triangles and bending elements automatically.
- Parameters:
pos (List[float]) – The position of the cloth in world space
rot (List[float]) – The orientation of the cloth in world space
vel (List[float]) – The velocity of the cloth in world space
dim_x (int) – The number of rectangular cells along the x-axis
dim_y (int) – The number of rectangular cells along the y-axis
cell_x (float) – The width of each cell in the x-direction
cell_y (float) – The width of each cell in the y-direction
mass (float) – The mass of each particle
reverse_winding (bool) – Flip the winding of the mesh
fix_left (bool) – Make the left-most edge of particles kinematic (fixed in place)
fix_right (bool) – Make the right-most edge of particles kinematic
fix_top (bool) – Make the top-most edge of particles kinematic
fix_bottom (bool) – Make the bottom-most edge of particles kinematic
tri_ke (float | None)
tri_ka (float | None)
tri_kd (float | None)
tri_drag (float | None)
tri_lift (float | None)
edge_ke (float | None)
edge_kd (float | None)
add_springs (bool)
spring_ke (float | None)
spring_kd (float | None)
particle_radius (float | None)
- Return type:
None
- add_cloth_mesh(
- pos,
- rot,
- scale,
- vel,
- vertices,
- indices,
- density,
- edge_callback=None,
- face_callback=None,
- tri_ke=None,
- tri_ka=None,
- tri_kd=None,
- tri_drag=None,
- tri_lift=None,
- edge_ke=None,
- edge_kd=None,
- add_springs=False,
- spring_ke=None,
- spring_kd=None,
- particle_radius=None,
Helper to create a cloth model from a regular triangle mesh
Creates one FEM triangle element and one bending element for every face and edge in the input triangle mesh
- Parameters:
pos (List[float]) – The position of the cloth in world space
rot (List[float]) – The orientation of the cloth in world space
vel (List[float]) – The velocity of the cloth in world space
indices (list[int]) – A list of triangle indices, 3 entries per-face
density (float) – The density per-area of the mesh
edge_callback – A user callback when an edge is created
face_callback – A user callback when a face is created
particle_radius (float | None) – The particle_radius which controls particle based collisions.
scale (float)
tri_ke (float | None)
tri_ka (float | None)
tri_kd (float | None)
tri_drag (float | None)
tri_lift (float | None)
edge_ke (float | None)
edge_kd (float | None)
add_springs (bool)
spring_ke (float | None)
spring_kd (float | None)
- Return type:
None
Note
The mesh should be two manifold.
- add_particle_grid(
- pos,
- rot,
- vel,
- dim_x,
- dim_y,
- dim_z,
- cell_x,
- cell_y,
- cell_z,
- mass,
- jitter,
- radius_mean=None,
- radius_std=0.0,
- add_soft_grid(
- pos,
- rot,
- vel,
- dim_x,
- dim_y,
- dim_z,
- cell_x,
- cell_y,
- cell_z,
- density,
- k_mu,
- k_lambda,
- k_damp,
- fix_left=False,
- fix_right=False,
- fix_top=False,
- fix_bottom=False,
- tri_ke=None,
- tri_ka=None,
- tri_kd=None,
- tri_drag=None,
- tri_lift=None,
Helper to create a rectangular tetrahedral FEM grid
Creates a regular grid of FEM tetrahedra and surface triangles. Useful for example to create beams and sheets. Each hexahedral cell is decomposed into 5 tetrahedral elements.
- Parameters:
pos (List[float]) – The position of the solid in world space
rot (List[float]) – The orientation of the solid in world space
vel (List[float]) – The velocity of the solid in world space
dim_x (int) – The number of rectangular cells along the x-axis
dim_y (int) – The number of rectangular cells along the y-axis
dim_z (int) – The number of rectangular cells along the z-axis
cell_x (float) – The width of each cell in the x-direction
cell_y (float) – The width of each cell in the y-direction
cell_z (float) – The width of each cell in the z-direction
density (float) – The density of each particle
k_mu (float) – The first elastic Lame parameter
k_lambda (float) – The second elastic Lame parameter
k_damp (float) – The damping stiffness
fix_left (bool) – Make the left-most edge of particles kinematic (fixed in place)
fix_right (bool) – Make the right-most edge of particles kinematic
fix_top (bool) – Make the top-most edge of particles kinematic
fix_bottom (bool) – Make the bottom-most edge of particles kinematic
tri_ke (float | None)
tri_ka (float | None)
tri_kd (float | None)
tri_drag (float | None)
tri_lift (float | None)
- Return type:
None
- add_soft_mesh(
- pos,
- rot,
- scale,
- vel,
- vertices,
- indices,
- density,
- k_mu,
- k_lambda,
- k_damp,
- tri_ke=None,
- tri_ka=None,
- tri_kd=None,
- tri_drag=None,
- tri_lift=None,
Helper to create a tetrahedral model from an input tetrahedral mesh
- Parameters:
pos (List[float]) – The position of the solid in world space
rot (List[float]) – The orientation of the solid in world space
vel (List[float]) – The velocity of the solid in world space
vertices (list[List[float]]) – A list of vertex positions, array of 3D points
indices (list[int]) – A list of tetrahedron indices, 4 entries per-element, flattened array
density (float) – The density per-area of the mesh
k_mu (float) – The first elastic Lame parameter
k_lambda (float) – The second elastic Lame parameter
k_damp (float) – The damping stiffness
scale (float)
tri_ke (float | None)
tri_ka (float | None)
tri_kd (float | None)
tri_drag (float | None)
tri_lift (float | None)
- Return type:
None
- set_ground_plane(
- normal=None,
- offset=0.0,
- ke=None,
- kd=None,
- kf=None,
- mu=None,
- restitution=None,
Create a ground plane for the world.
If the normal is not specified, the
up_vectorof theModelBuilderis used.
- set_coloring(particle_color_groups)[source]#
Set coloring information with user-provided coloring.
- Parameters:
particle_color_groups – A list of list or np.array with dtype`=`int. The length of the list is the number of colors and each list or np.array contains the indices of vertices with this color.
- color(
- include_bending=False,
- balance_colors=True,
- target_max_min_color_ratio=1.1,
- coloring_algorithm=ColoringAlgorithm.MCS,
Run coloring algorithm to generate coloring information.
- Parameters:
include_bending_energy – Whether to consider bending energy for trimeshes in the coloring process. If set to True, the generated graph will contain all the edges connecting o1 and o2; otherwise, the graph will be equivalent to the trimesh.
balance_colors – Whether to apply the color balancing algorithm to balance the size of each color
target_max_min_color_ratio – the color balancing algorithm will stop when the ratio between the largest color and the smallest color reaches this value
algorithm – Value should be an enum type of ColoringAlgorithm, otherwise it will raise an error. ColoringAlgorithm.mcs means using the MCS coloring algorithm, while ColoringAlgorithm.ordered_greedy means using the degree-ordered greedy algorithm. The MCS algorithm typically generates 30% to 50% fewer colors compared to the ordered greedy algorithm, while maintaining the same linear complexity. Although MCS has a constant overhead that makes it about twice as slow as the greedy algorithm, it produces significantly better coloring results. We recommend using MCS, especially if coloring is only part of the preprocessing.
- Return type:
None
Note
References to the coloring algorithm:
MCS: Pereira, F. M. Q., & Palsberg, J. (2005, November). Register allocation via coloring of chordal graphs. In Asian Symposium on Programming Languages and Systems (pp. 315-329). Berlin, Heidelberg: Springer Berlin Heidelberg.
Ordered Greedy: Ton-That, Q. M., Kry, P. G., & Andrews, S. (2023). Parallel block Neo-Hookean XPBD using graph clustering. Computers & Graphics, 110, 1-10.
- finalize(device=None, requires_grad=False)[source]#
Convert this builder object to a concrete model for simulation.
After building simulation elements this method should be called to transfer all data to device memory ready for simulation.
- Parameters:
device – The simulation device to use, e.g.: ‘cpu’, ‘cuda’
requires_grad – Whether to enable gradient computation for the model
- Returns:
A model object.
- Return type:
- class warp.sim.Model(device=None)[source]#
Holds the definition of the simulation model
This class holds the non-time varying description of the system, i.e.: all geometry, constraints, and parameters used to describe the simulation.
- requires_grad#
Indicates whether the model was finalized (see
ModelBuilder.finalize()) with gradient computation enabled- Type:
- num_envs#
Number of articulation environments that were added to the ModelBuilder via add_builder
- Type:
- particle_ke#
Particle normal contact stiffness (used by
SemiImplicitIntegrator), shape [particle_count], float- Type:
- particle_kd#
Particle normal contact damping (used by
SemiImplicitIntegrator), shape [particle_count], float- Type:
- particle_kf#
Particle friction force stiffness (used by
SemiImplicitIntegrator), shape [particle_count], float- Type:
- particle_grid#
HashGrid instance used for accelerated simulation of particle interactions
- Type:
- shape_materials#
Rigid shape contact materials, shape [shape_count], float
- Type:
- shape_shape_geo#
Shape geometry properties (geo type, scale, thickness, etc.), shape [shape_count, 3], float
- Type:
- shape_collision_radius#
Collision radius of each shape used for bounding sphere broadphase collision checking, shape [shape_count], float
- Type:
- shape_ground_collision#
Indicates whether each shape should collide with the ground, shape [shape_count], bool
- Type:
- shape_shape_collision#
Indicates whether each shape should collide with any other shape, shape [shape_count], bool
- Type:
- shape_contact_pairs#
Pairs of shape indices that may collide, shape [contact_pair_count, 2], int
- Type:
- shape_ground_contact_pairs#
Pairs of shape, ground indices that may collide, shape [ground_contact_pair_count, 2], int
- Type:
- edge_indices#
Bending edge indices, shape [edge_count*4], int, each row is [o0, o1, v1, v2], where v1, v2 are on the edge
- Type:
- edge_bending_properties#
Bending edge stiffness and damping parameters, shape [edge_count, 2], float
- Type:
- tet_materials#
Tetrahedral elastic parameters in form \(k_{mu}, k_{lambda}, k_{damp}\), shape [tet_count, 3]
- Type:
- muscle_start#
Start index of the first muscle point per muscle, shape [muscle_count], int
- Type:
- body_q#
Poses of rigid bodies used for state initialization, shape [body_count, 7], float
- Type:
- body_qd#
Velocities of rigid bodies used for state initialization, shape [body_count, 6], float
- Type:
- body_inertia#
Rigid body inertia tensor (relative to COM), shape [body_count, 3, 3], float
- Type:
- body_inv_inertia#
Rigid body inverse inertia tensor (relative to COM), shape [body_count, 3, 3], float
- Type:
- joint_q#
Generalized joint positions used for state initialization, shape [joint_coord_count], float
- Type:
- joint_qd#
Generalized joint velocities used for state initialization, shape [joint_dof_count], float
- Type:
- joint_ancestor#
Maps from joint index to the index of the joint that has the current joint parent body as child (-1 if no such joint ancestor exists), shape [joint_count], int
- Type:
- joint_armature#
Armature for each joint axis (only used by
FeatherstoneIntegrator), shape [joint_dof_count], float- Type:
- joint_axis_dim#
Number of linear and angular axes per joint, shape [joint_count, 2], int
- Type:
- joint_axis_mode#
Joint axis mode, shape [joint_axis_count], int. See Joint modes.
- Type:
- joint_enabled#
Controls which joint is simulated (bodies become disconnected if False), shape [joint_count], int
Note
This setting is not supported by
FeatherstoneIntegrator.- Type:
- joint_limit_ke#
Joint position limit stiffness (used by the Euler integrators), shape [joint_axis_count], float
- Type:
- joint_limit_kd#
Joint position limit damping (used by the Euler integrators), shape [joint_axis_count], float
- Type:
- joint_q_start#
Start index of the first position coordinate per joint (note the last value is an additional sentinel entry to allow for querying the q dimensionality of joint i via
joint_q_start[i+1] - joint_q_start[i]), shape [joint_count + 1], int- Type:
- joint_qd_start#
Start index of the first velocity coordinate per joint (note the last value is an additional sentinel entry to allow for querying the qd dimensionality of joint i via
joint_qd_start[i+1] - joint_qd_start[i]), shape [joint_count + 1], int- Type:
- joint_attach_ke#
Joint attachment force stiffness (used by
SemiImplicitIntegrator)- Type:
- joint_attach_kd#
Joint attachment force damping (used by
SemiImplicitIntegrator)- Type:
- soft_contact_kf#
Stiffness of friction force in soft contacts (used by the Euler integrators)
- Type:
- soft_contact_restitution#
Restitution coefficient of soft contacts (used by
XPBDIntegrator)- Type:
- rigid_contact_max#
Maximum number of potential rigid body contact points to generate ignoring the rigid_mesh_contact_max limit.
- Type:
- rigid_contact_max_limited#
Maximum number of potential rigid body contact points to generate respecting the rigid_mesh_contact_max limit.
- Type:
- rigid_mesh_contact_max#
Maximum number of rigid body contact points to generate per mesh (0 = unlimited, default)
- Type:
- rigid_contact_torsional_friction#
Torsional friction coefficient for rigid body contacts (used by
XPBDIntegrator)- Type:
- rigid_contact_rolling_friction#
Rolling friction coefficient for rigid body contacts (used by
XPBDIntegrator)- Type:
- rigid_contact_point0#
Contact point relative to frame of body 0, shape [rigid_contact_max], vec3
- Type:
- rigid_contact_point1#
Contact point relative to frame of body 1, shape [rigid_contact_max], vec3
- Type:
- rigid_contact_offset0#
Contact offset due to contact thickness relative to body 0, shape [rigid_contact_max], vec3
- Type:
- rigid_contact_offset1#
Contact offset due to contact thickness relative to body 1, shape [rigid_contact_max], vec3
- Type:
- rigid_contact_tids#
Triangle indices of the contact points, shape [rigid_contact_max], int
- Type:
- rigid_contact_pairwise_counter#
Pairwise counter for contact generation, shape [rigid_contact_max], int
- Type:
- rigid_contact_broad_shape0#
Broadphase shape index of shape 0 per contact, shape [rigid_contact_max], int
- Type:
- rigid_contact_broad_shape1#
Broadphase shape index of shape 1 per contact, shape [rigid_contact_max], int
- Type:
- up_vector#
Up vector of the world, shape [3], float
- Type:
np.ndarray
- gravity#
Gravity vector, shape [3], float
- Type:
np.ndarray
- joint_coord_count#
Total number of position degrees of freedom of all joints in the system
- Type:
- particle_color_groups#
The coloring of all the particles, used for VBD’s Gauss-Seidel iteration. Each array contains indices of particles sharing the same color.
- device#
Device on which the Model was allocated
- Type:
wp.Device
Note
It is strongly recommended to use the ModelBuilder to construct a simulation rather than creating your own Model object directly, however it is possible to do so if desired.
- state(requires_grad=None)[source]#
Returns a state object for the model
The returned state will be initialized with the initial configuration given in the model description.
- Parameters:
requires_grad (bool) – Manual overwrite whether the state variables should have requires_grad enabled (defaults to None to use the model’s setting
requires_grad)- Returns:
The state object
- Return type:
- control(requires_grad=None, clone_variables=True)[source]#
Returns a control object for the model.
The returned control object will be initialized with the control inputs given in the model description.
- Parameters:
requires_grad (bool) – Manual overwrite whether the control variables should have requires_grad enabled (defaults to None to use the model’s setting
requires_grad)clone_variables (bool) – Whether to clone the control inputs or use the original data
- Returns:
The control object
- Return type:
- count_contact_points()[source]#
Counts the maximum number of rigid contact points that need to be allocated. This function returns two values corresponding to the maximum number of potential contacts excluding the limiting from Model.rigid_mesh_contact_max and the maximum number of contact points that may be generated when considering the Model.rigid_mesh_contact_max limit.
- Returns:
potential_count (int): Potential number of contact points
actual_count (int): Actual number of contact points
- class warp.sim.ModelShapeMaterials#
- cls[source]#
alias of
ModelShapeMaterials
- default_constructor = <Function ModelShapeMaterials_bcc267f8()>#
- hash = b'\xbc\xc2g\xf8l\x04\xd9\x0e\xa6\xcb\x1e\xf3\xd6\x98\xd4\x9dr\xb5\xd5\xc3WX\x14XRRW\x93\xc7]\x0c\xed'#
- key = 'ModelShapeMaterials'#
- module = <warp.context.Module object>#
- native_name = 'ModelShapeMaterials_bcc267f8'#
- value_constructor = <Function ModelShapeMaterials_bcc267f8(ke: array(ndim=1, dtype=float32), kd: array(ndim=1, dtype=float32), kf: array(ndim=1, dtype=float32), ka: array(ndim=1, dtype=float32), mu: array(ndim=1, dtype=float32), restitution: array(ndim=1, dtype=float32))>#
- vars = {'ka': <warp.codegen.Var object>, 'kd': <warp.codegen.Var object>, 'ke': <warp.codegen.Var object>, 'kf': <warp.codegen.Var object>, 'mu': <warp.codegen.Var object>, 'restitution': <warp.codegen.Var object>}#
- class warp.sim.ModelShapeGeometry#
- cls[source]#
alias of
ModelShapeGeometry
- default_constructor = <Function ModelShapeGeometry_a9b47f7f()>#
- hash = b'\xa9\xb4\x7f\x7f\xfb8\x10.\xb28\xd7\x0b-\x01\xd9<\x98\xe0\x81\x08\xef\x13\xc0\xa0=%B\xf5\xff\xbb\xf4a'#
- key = 'ModelShapeGeometry'#
- module = <warp.context.Module object>#
- native_name = 'ModelShapeGeometry_a9b47f7f'#
- value_constructor = <Function ModelShapeGeometry_a9b47f7f(type: array(ndim=1, dtype=int32), is_solid: array(ndim=1, dtype=uint8), thickness: array(ndim=1, dtype=float32), source: array(ndim=1, dtype=uint64), scale: array(ndim=1, dtype=vec3f))>#
- vars = {'is_solid': <warp.codegen.Var object>, 'scale': <warp.codegen.Var object>, 'source': <warp.codegen.Var object>, 'thickness': <warp.codegen.Var object>, 'type': <warp.codegen.Var object>}#
- class warp.sim.JointAxis(
- axis,
- limit_lower=-math.inf,
- limit_upper=math.inf,
- limit_ke=100.0,
- limit_kd=10.0,
- action=None,
- target_ke=0.0,
- target_kd=0.0,
- mode=JOINT_MODE_FORCE,
Describes a joint axis that can have limits and be driven towards a target.
- axis#
The 3D axis that this JointAxis object describes, or alternatively another JointAxis object to copy from
- Type:
3D vector or JointAxis
- limit_ke#
The elastic stiffness of the joint axis limits, only respected by
SemiImplicitIntegratorandFeatherstoneIntegrator- Type:
- limit_kd#
The damping stiffness of the joint axis limits, only respected by
SemiImplicitIntegratorandFeatherstoneIntegrator- Type:
- action#
The force applied by default to this joint axis, or the target position or velocity (depending on the mode, see Joint modes) of the joint axis
- Type:
- mode#
The mode of the joint axis, see Joint modes
- Type:
- class warp.sim.Mesh(vertices, indices, compute_inertia=True, is_solid=True)[source]#
Describes a triangle collision mesh for simulation
Example mesh creation from a triangle OBJ mesh file:#
See
load_mesh()which is provided as a utility function.import numpy as np import warp as wp import warp.sim import openmesh m = openmesh.read_trimesh("mesh.obj") mesh_points = np.array(m.points()) mesh_indices = np.array(m.face_vertex_indices(), dtype=np.int32).flatten() mesh = wp.sim.Mesh(mesh_points, mesh_indices)
- vertices#
Mesh 3D vertices points
- Type:
List[Vec3]
- I#
3x3 inertia matrix of the mesh assuming density of 1.0 (around the center of mass)
- Type:
Mat33
- com#
The center of mass of the body
- Type:
Vec3
- __init__(vertices, indices, compute_inertia=True, is_solid=True)[source]#
Construct a Mesh object from a triangle mesh
The mesh center of mass and inertia tensor will automatically be calculated using a density of 1.0. This computation is only valid if the mesh is closed (two-manifold).
- Parameters:
indices (list[int]) – List of triangle indices, 3 per-element
compute_inertia – If True, the mass, inertia tensor and center of mass will be computed assuming density of 1.0
is_solid – If True, the mesh is assumed to be a solid during inertia computation, otherwise it is assumed to be a hollow surface
- class warp.sim.SDF(volume=None, I=None, mass=1.0, com=None)[source]#
Describes a signed distance field for simulation
- I#
3x3 inertia matrix of the SDF
- Type:
Mat33
- com#
The center of mass of the SDF
- Type:
Vec3
Joint types#
- warp.sim.JOINT_PRISMATIC#
Prismatic (slider) joint
- warp.sim.JOINT_REVOLUTE#
Revolute (hinge) joint
- warp.sim.JOINT_BALL#
Ball (spherical) joint with quaternion state representation
- warp.sim.JOINT_FIXED#
Fixed (static) joint
- warp.sim.JOINT_FREE#
Free (floating) joint
- warp.sim.JOINT_COMPOUND#
Compound joint with 3 rotational degrees of freedom
- warp.sim.JOINT_UNIVERSAL#
Universal joint with 2 rotational degrees of freedom
- warp.sim.JOINT_DISTANCE#
Distance joint that keeps two bodies at a distance within its joint limits (only supported in
XPBDIntegratorat the moment)
- warp.sim.JOINT_D6#
Generic D6 joint with up to 3 translational and 3 rotational degrees of freedom
Joint control modes#
Joint modes control the behavior of how the joint control input Control.joint_act affects the torque applied at a given joint axis.
By default, it behaves as a direct force application via JOINT_MODE_FORCE. Other modes can be used to implement joint position or velocity drives:
- warp.sim.JOINT_MODE_FORCE#
This is the default control mode where the control input is the torque \(\tau\) applied at the joint axis.
- warp.sim.JOINT_MODE_TARGET_POSITION#
The control input is the target position \(\mathbf{q}_{\text{target}}\) which is achieved via PD control of torque \(\tau\) where the proportional and derivative gains are set by
Model.joint_target_keandModel.joint_target_kd:\[\tau = k_e (\mathbf{q}_{\text{target}} - \mathbf{q}) - k_d \mathbf{\dot{q}}\]
- warp.sim.JOINT_MODE_TARGET_VELOCITY#
The control input is the target velocity \(\mathbf{\dot{q}}_{\text{target}}\) which is achieved via a controller of torque \(\tau\) that brings the velocity at the joint axis to the target through proportional gain
Model.joint_target_ke:\[\tau = k_e (\mathbf{\dot{q}}_{\text{target}} - \mathbf{\dot{q}})\]
State#
- class warp.sim.State[source]#
Time-varying state data for a
Model.Time-varying state data includes particle positions, velocities, rigid body states, and anything that is output from the integrator as derived data, e.g.: forces.
The exact attributes depend on the contents of the model. State objects should generally be created using the
Model.state()function.- particle_q: array | None#
Array of 3D particle positions with shape
(particle_count,)and typevec3.
- particle_qd: array | None#
Array of 3D particle velocities with shape
(particle_count,)and typevec3.
- body_q: array | None#
Array of body coordinates (7-dof transforms) in maximal coordinates with shape
(body_count,)and typetransform.
- body_qd: array | None#
Array of body velocities in maximal coordinates (first three entries represent angular velocity, last three entries represent linear velocity) with shape
(body_count,)and typespatial_vector.
- body_f: array | None#
Array of body forces in maximal coordinates (first three entries represent torque, last three entries represent linear force) with shape
(body_count,)and typespatial_vector.Note
body_frepresents external wrenches in world frame and denotes wrenches measured w.r.t. to the body’s center of mass for all integrators exceptFeatherstoneIntegrator, which assumes the wrenches are measured w.r.t. world origin.
- joint_q: array | None#
Array of generalized joint coordinates with shape
(joint_coord_count,)and typefloat.
- joint_qd: array | None#
Array of generalized joint velocities with shape
(joint_dof_count,)and typefloat.
- clear_forces()[source]#
Clear all forces (for particles and bodies) in the state object.
- Return type:
None
- property requires_grad: bool[source]#
Indicates whether the state arrays have gradient computation enabled.
Control#
- class warp.sim.Control(model=None)[source]#
Time-varying control data for a
Model.Time-varying control data includes joint control inputs, muscle activations, and activation forces for triangle and tetrahedral elements.
The exact attributes depend on the contents of the model. Control objects should generally be created using the
Model.control()function.- Parameters:
model (Model | None)
- joint_act: array | None#
Array of joint control inputs with shape
(joint_axis_count,)and typefloat.
- tri_activations: array | None#
Array of triangle element activations with shape
(tri_count,)and typefloat.
- tet_activations: array | None#
Array of tetrahedral element activations with shape with shape
(tet_count,) and type ``float.
Forward / Inverse Kinematics#
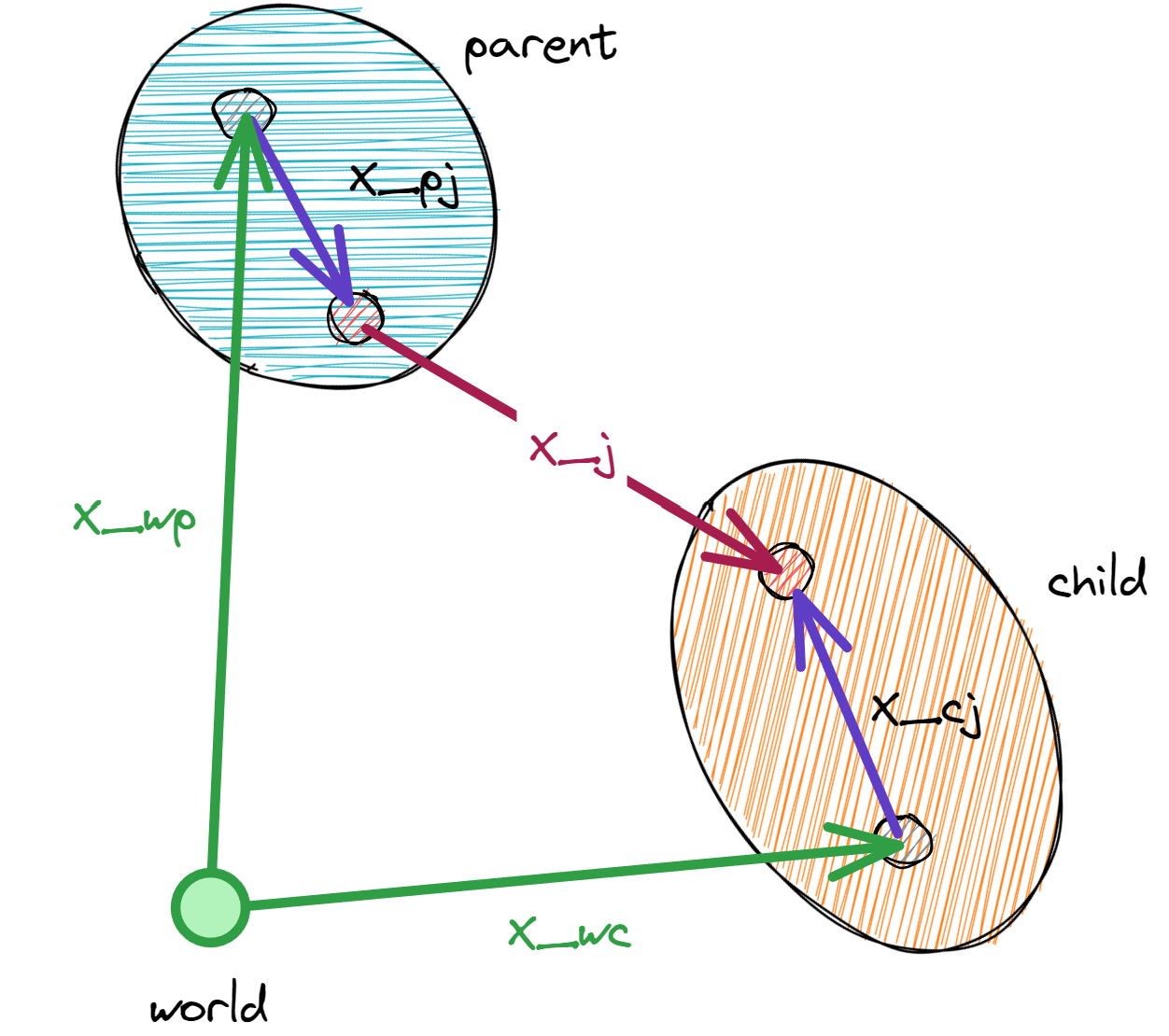
Articulated rigid-body mechanisms are kinematically described by the joints that connect the bodies as well as the relative transform from the parent and child body to the respective anchor frames of the joint in the parent and child body:
Symbol |
Description |
|---|---|
x_wp |
World transform of the parent body (stored at |
x_wc |
World transform of the child body (stored at |
x_pj |
Transform from the parent body to the joint parent anchor frame (defined by |
x_cj |
Transform from the child body to the joint child anchor frame (defined by |
x_j |
Joint transform from the joint parent anchor frame to the joint child anchor frame |
In the forward kinematics, the joint transform is determined by the joint coordinates (generalized joint positions State.joint_q and velocities State.joint_qd).
Given the parent body’s world transform \(x_{wp}\) and the joint transform \(x_{j}\), the child body’s world transform \(x_{wc}\) is computed as:
- warp.sim.eval_fk(model, joint_q, joint_qd, mask, state)[source]#
Evaluates the model’s forward kinematics given the joint coordinates and updates the state’s body information (
State.body_qandState.body_qd).- Parameters:
model (Model) – The model to evaluate.
joint_q (array) – Generalized joint position coordinates, shape [joint_coord_count], float
joint_qd (array) – Generalized joint velocity coordinates, shape [joint_dof_count], float
mask (array) – The mask to use to enable / disable FK for an articulation. If None then treat all as enabled, shape [articulation_count], int/bool
state (State) – The state to update.
- warp.sim.eval_ik(model, state, joint_q, joint_qd)[source]#
Evaluates the model’s inverse kinematics given the state’s body information (
State.body_qandState.body_qd) and updates the generalized joint coordinates joint_q and joint_qd.- Parameters:
model (Model) – The model to evaluate.
state (State) – The state with the body’s maximal coordinates (positions
State.body_qand velocitiesState.body_qd) to use.joint_q (array) – Generalized joint position coordinates, shape [joint_coord_count], float
joint_qd (array) – Generalized joint velocity coordinates, shape [joint_dof_count], float
Integrators#
- class warp.sim.Integrator[source]#
Generic base class for integrators. Provides methods to integrate rigid bodies and particles.
- integrate_bodies(
- model,
- state_in,
- state_out,
- dt,
- angular_damping=0.0,
Integrate the rigid bodies of the model.
- class warp.sim.SemiImplicitIntegrator(angular_damping=0.05, friction_smoothing=1.0)[source]#
A semi-implicit integrator using symplectic Euler
After constructing Model and State objects this time-integrator may be used to advance the simulation state forward in time.
Semi-implicit time integration is a variational integrator that preserves energy, however it not unconditionally stable, and requires a time-step small enough to support the required stiffness and damping forces.
See: https://en.wikipedia.org/wiki/Semi-implicit_Euler_method
Example
integrator = wp.SemiImplicitIntegrator() # simulation loop for i in range(100): state = integrator.simulate(model, state_in, state_out, dt)
- __init__(
- angular_damping=0.05,
- friction_smoothing=1.0,
- Parameters:
angular_damping (float, optional) – Angular damping factor. Defaults to 0.05.
friction_smoothing (float, optional) – The delta value for the Huber norm (see
warp.math.norm_huber()) used for the friction velocity normalization. Defaults to 1.0.
- class warp.sim.XPBDIntegrator(
- iterations=2,
- soft_body_relaxation=0.9,
- soft_contact_relaxation=0.9,
- joint_linear_relaxation=0.7,
- joint_angular_relaxation=0.4,
- rigid_contact_relaxation=0.8,
- rigid_contact_con_weighting=True,
- angular_damping=0.0,
- enable_restitution=False,
An implicit integrator using eXtended Position-Based Dynamics (XPBD) for rigid and soft body simulation.
References
Miles Macklin, Matthias Müller, and Nuttapong Chentanez. 2016. XPBD: position-based simulation of compliant constrained dynamics. In Proceedings of the 9th International Conference on Motion in Games (MIG ‘16). Association for Computing Machinery, New York, NY, USA, 49-54. https://doi.org/10.1145/2994258.2994272
Matthias Müller, Miles Macklin, Nuttapong Chentanez, Stefan Jeschke, and Tae-Yong Kim. 2020. Detailed rigid body simulation with extended position based dynamics. In Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA ‘20). Eurographics Association, Goslar, DEU, Article 10, 1-12. https://doi.org/10.1111/cgf.14105
After constructing
Model,State, andControl(optional) objects, this time-integrator may be used to advance the simulation state forward in time.Example
integrator = wp.XPBDIntegrator() # simulation loop for i in range(100): state = integrator.simulate(model, state_in, state_out, dt, control)
- __init__(
- iterations=2,
- soft_body_relaxation=0.9,
- soft_contact_relaxation=0.9,
- joint_linear_relaxation=0.7,
- joint_angular_relaxation=0.4,
- rigid_contact_relaxation=0.8,
- rigid_contact_con_weighting=True,
- angular_damping=0.0,
- enable_restitution=False,
- apply_body_deltas(
- model,
- state_in,
- state_out,
- body_deltas,
- dt,
- rigid_contact_inv_weight=None,
- class warp.sim.FeatherstoneIntegrator(
- model,
- angular_damping=0.05,
- update_mass_matrix_every=1,
- friction_smoothing=1.0,
- use_tile_gemm=False,
- fuse_cholesky=True,
A semi-implicit integrator using symplectic Euler that operates on reduced (also called generalized) coordinates to simulate articulated rigid body dynamics based on Featherstone’s composite rigid body algorithm (CRBA).
See: Featherstone, Roy. Rigid Body Dynamics Algorithms. Springer US, 2014.
Instead of maximal coordinates
State.body_q(rigid body positions) andState.body_qd(rigid body velocities) as is the caseSemiImplicitIntegrator,FeatherstoneIntegratorusesState.joint_qandState.joint_qdto represent the positions and velocities of joints without allowing any redundant degrees of freedom.After constructing
ModelandStateobjects this time-integrator may be used to advance the simulation state forward in time.Note
Unlike
SemiImplicitIntegratorandXPBDIntegrator,FeatherstoneIntegratordoes not simulate rigid bodies with nonzero mass as floating bodies if they are not connected through any joints. Floating-base systems require an explicit free joint with which the body is connected to the world, seeModelBuilder.add_joint_free().Semi-implicit time integration is a variational integrator that preserves energy, however it not unconditionally stable, and requires a time-step small enough to support the required stiffness and damping forces.
See: https://en.wikipedia.org/wiki/Semi-implicit_Euler_method
Example
integrator = wp.FeatherstoneIntegrator(model) # simulation loop for i in range(100): state = integrator.simulate(model, state_in, state_out, dt)
Note
The
FeatherstoneIntegratorrequires theModelto be passed in as a constructor argument.- __init__(
- model,
- angular_damping=0.05,
- update_mass_matrix_every=1,
- friction_smoothing=1.0,
- use_tile_gemm=False,
- fuse_cholesky=True,
- Parameters:
model (Model) – the model to be simulated.
angular_damping (float, optional) – Angular damping factor. Defaults to 0.05.
update_mass_matrix_every (int, optional) – How often to update the mass matrix (every n-th time the
simulate()function gets called). Defaults to 1.friction_smoothing (float, optional) – The delta value for the Huber norm (see
warp.math.norm_huber()) used for the friction velocity normalization. Defaults to 1.0.
- class warp.sim.VBDIntegrator(
- model,
- iterations=10,
- handle_self_contact=False,
- penetration_free_conservative_bound_relaxation=0.42,
- friction_epsilon=1e-2,
- body_particle_contact_buffer_pre_alloc=4,
- vertex_collision_buffer_pre_alloc=32,
- edge_collision_buffer_pre_alloc=64,
- triangle_collision_buffer_pre_alloc=32,
- edge_edge_parallel_epsilon=1e-5,
An implicit integrator using Vertex Block Descent (VBD) for cloth simulation.
References
Anka He Chen, Ziheng Liu, Yin Yang, and Cem Yuksel. 2024. Vertex Block Descent. ACM Trans. Graph. 43, 4, Article 116 (July 2024), 16 pages. https://doi.org/10.1145/3658179
Note that VBDIntegrator’s constructor requires a
Modelobject as input, so that it can do some precomputation and preallocate the space. After construction, you must provide the sameModelobject that you used that was used during construction. Currently, you must manually provide particle coloring and assign it to model.particle_color_groups to make VBD work.VBDIntegrator.simulate accepts three arguments: class:Model,
State, andControl(optional) objects, this time-integrator may be used to advance the simulation state forward in time.Example
model.particle_color_groups = # load or generate particle coloring integrator = wp.VBDIntegrator(model) # simulation loop for i in range(100): state = integrator.simulate(model, state_in, state_out, dt, control)
- Parameters:
model (Model)
- __init__(
- model,
- iterations=10,
- handle_self_contact=False,
- penetration_free_conservative_bound_relaxation=0.42,
- friction_epsilon=1e-2,
- body_particle_contact_buffer_pre_alloc=4,
- vertex_collision_buffer_pre_alloc=32,
- edge_collision_buffer_pre_alloc=64,
- triangle_collision_buffer_pre_alloc=32,
- edge_edge_parallel_epsilon=1e-5,
- Parameters:
model (Model)
- simulate(model, state_in, state_out, dt, control=None)[source]#
Simulate the model for a given time step using the given control input.
- simulate_one_step_with_collisions_penetration_free(
- model,
- state_in,
- state_out,
- dt,
- control=None,
- rebuild_bvh(state)[source]#
This function will rebuild the BVHs used for detecting self-contacts using the input state.
When the simulated object deforms significantly, simply refitting the BVH can lead to deterioration of the BVH’s quality. In these cases, rebuilding the entire tree is necessary to achieve better querying efficiency.
- Parameters:
state (wp.sim.State) – The state whose particle positions (
State.particle_q) will be used for rebuilding the BVHs.
- count_num_adjacent_edges = <warp.context.Kernel object>#
- fill_adjacent_edges = <warp.context.Kernel object>#
- count_num_adjacent_faces = <warp.context.Kernel object>#
Collisions#
Shapes are used to define the geometry of the rigid bodies in the simulation. Shapes without a parent body are considered static shapes.
Use the add_shape_* methods in ModelBuilder to add shapes to the model, such as ModelBuilder.add_shape_sphere(), ModelBuilder.add_shape_box(), ModelBuilder.add_shape_capsule(), ModelBuilder.add_shape_cylinder(), ModelBuilder.add_shape_cone(), ModelBuilder.add_shape_mesh(), ModelBuilder.add_shape_sdf(), and ModelBuilder.add_shape_plane().
The following shape types are supported:
- warp.sim.GEO_SPHERE#
Sphere shape
- warp.sim.GEO_BOX#
Box shape
- warp.sim.GEO_CAPSULE#
Capsule shape
- warp.sim.GEO_CYLINDER#
Cylinder shape
- warp.sim.GEO_CONE#
Cone shape
- warp.sim.GEO_PLANE#
Rectangular plane shape (unlimited if the width or length is set to 0)
Besides particle collisions with these shapes, the following rigid-body shape collisions are supported:
Particle |
Sphere |
Box |
Capsule |
Cylinder |
Cone |
Mesh |
SDF |
Plane |
|
|---|---|---|---|---|---|---|---|---|---|
Particle |
✅ |
✅ |
✅ |
✅ |
✅ |
✅ |
✅ |
✅ |
✅ |
Sphere |
✅ |
✅ |
✅ |
✅ |
✅ |
✅ |
|||
Box |
✅ |
✅ |
✅ |
✅ |
✅ |
✅ |
|||
Capsule |
✅ |
✅ |
✅ |
✅ |
✅ |
✅ |
|||
Cylinder |
✅ |
||||||||
Cone |
✅ |
||||||||
Mesh |
✅ |
✅ |
✅ |
✅ |
✅ |
✅ |
|||
SDF |
✅ |
||||||||
Plane |
✅ |
✅ |
✅ |
✅ |
✅ |
- warp.sim.collide(
- model,
- state,
- edge_sdf_iter=10,
- iterate_mesh_vertices=True,
- requires_grad=None,
Generate contact points for the particles and rigid bodies in the model for use in contact-dynamics kernels.
- Parameters:
model (Model) – The model to be simulated.
state (State) – The state of the model.
edge_sdf_iter (int) – Number of search iterations for finding closest contact points between edges and SDF.
iterate_mesh_vertices (bool) – Whether to iterate over all vertices of a mesh for contact generation (used for capsule/box <> mesh collision).
requires_grad (bool | None) – Whether to duplicate contact arrays for gradient computation (if
None, usesmodel.requires_grad).
- Return type:
None
Importers#
Warp sim supports the loading of simulation models from URDF, MuJoCo (MJCF), and USD Physics files.
- warp.sim.parse_urdf(
- urdf_filename,
- builder,
- xform=None,
- floating=False,
- base_joint=None,
- density=1000.0,
- stiffness=100.0,
- damping=10.0,
- armature=0.0,
- contact_ke=1.0e4,
- contact_kd=1.0e3,
- contact_kf=1.0e2,
- contact_ka=0.0,
- contact_mu=0.25,
- contact_restitution=0.5,
- contact_thickness=0.0,
- limit_ke=100.0,
- limit_kd=10.0,
- joint_limit_lower=-1e6,
- joint_limit_upper=1e6,
- scale=1.0,
- hide_visuals=False,
- parse_visuals_as_colliders=False,
- force_show_colliders=False,
- enable_self_collisions=True,
- ignore_inertial_definitions=True,
- ensure_nonstatic_links=True,
- static_link_mass=1e-2,
- collapse_fixed_joints=False,
Parses a URDF file and adds the bodies and joints to the given ModelBuilder.
- Parameters:
urdf_filename (str) – The filename of the URDF file to parse.
builder (ModelBuilder) – The
ModelBuilderto add the bodies and joints to.xform (transform) – The transform to apply to the root body.
floating (bool) – If True, the root body is a free joint. If False, the root body is connected via a fixed joint to the world, unless a base_joint is defined.
base_joint (Union[str, dict]) – The joint by which the root body is connected to the world. This can be either a string defining the joint axes of a D6 joint with comma-separated positional and angular axis names (e.g. “px,py,rz” for a D6 joint with linear axes in x, y and an angular axis in z) or a dict with joint parameters (see
ModelBuilder.add_joint()).density (float) – The density of the shapes in kg/m^3 which will be used to calculate the body mass and inertia.
stiffness (float) – The stiffness of the joints.
damping (float) – The damping of the joints.
armature (float) – The armature of the joints (bias to add to the inertia diagonals that may stabilize the simulation).
contact_ke (float) – The stiffness of the shape contacts (used by the Euler integrators).
contact_kd (float) – The damping of the shape contacts (used by the Euler integrators).
contact_kf (float) – The friction stiffness of the shape contacts (used by the Euler integrators).
contact_ka (float) – The adhesion distance of the shape contacts (used by the Euler integrators).
contact_mu (float) – The friction coefficient of the shape contacts.
contact_restitution (float) – The restitution coefficient of the shape contacts.
contact_thickness (float) – The thickness to add to the shape geometry.
limit_ke (float) – The stiffness of the joint limits (used by the Euler integrators).
limit_kd (float) – The damping of the joint limits (used by the Euler integrators).
joint_limit_lower (float) – The default lower joint limit if not specified in the URDF.
joint_limit_upper (float) – The default upper joint limit if not specified in the URDF.
scale (float) – The scaling factor to apply to the imported mechanism.
hide_visuals (bool) – If True, hide visual shapes.
parse_visuals_as_colliders (bool) – If True, the geometry defined under the <visual> tags is used for collision handling instead of the <collision> geometries.
force_show_colliders (bool) – If True, the collision shapes are always shown, even if there are visual shapes.
enable_self_collisions (bool) – If True, self-collisions are enabled.
ignore_inertial_definitions (bool) – If True, the inertial parameters defined in the URDF are ignored and the inertia is calculated from the shape geometry.
ensure_nonstatic_links (bool) – If True, links with zero mass are given a small mass (see static_link_mass) to ensure they are dynamic.
static_link_mass (float) – The mass to assign to links with zero mass (if ensure_nonstatic_links is set to True).
collapse_fixed_joints (bool) – If True, fixed joints are removed and the respective bodies are merged.
- warp.sim.parse_mjcf(
- mjcf_filename,
- builder,
- xform=None,
- floating=False,
- base_joint=None,
- density=1000.0,
- stiffness=100.0,
- damping=10.0,
- armature=0.0,
- armature_scale=1.0,
- contact_ke=1.0e4,
- contact_kd=1.0e3,
- contact_kf=1.0e2,
- contact_ka=0.0,
- contact_mu=0.25,
- contact_restitution=0.5,
- contact_thickness=0.0,
- limit_ke=100.0,
- limit_kd=10.0,
- joint_limit_lower=-1e6,
- joint_limit_upper=1e6,
- scale=1.0,
- hide_visuals=False,
- parse_visuals_as_colliders=False,
- parse_meshes=True,
- up_axis='Z',
- ignore_names=(),
- ignore_classes=None,
- visual_classes=('visual',),
- collider_classes=('collision',),
- no_class_as_colliders=True,
- force_show_colliders=False,
- enable_self_collisions=False,
- ignore_inertial_definitions=True,
- ensure_nonstatic_links=True,
- static_link_mass=1e-2,
- collapse_fixed_joints=False,
- verbose=False,
Parses MuJoCo XML (MJCF) file and adds the bodies and joints to the given ModelBuilder.
- Parameters:
mjcf_filename (str) – The filename of the MuJoCo file to parse.
builder (ModelBuilder) – The
ModelBuilderto add the bodies and joints to.xform (transform) – The transform to apply to the imported mechanism.
floating (bool) – If True, the root body is a free joint. If False, the root body is connected via a fixed joint to the world, unless a base_joint is defined.
base_joint (Union[str, dict]) – The joint by which the root body is connected to the world. This can be either a string defining the joint axes of a D6 joint with comma-separated positional and angular axis names (e.g. “px,py,rz” for a D6 joint with linear axes in x, y and an angular axis in z) or a dict with joint parameters (see
ModelBuilder.add_joint()).density (float) – The density of the shapes in kg/m^3 which will be used to calculate the body mass and inertia.
stiffness (float) – The stiffness of the joints.
damping (float) – The damping of the joints.
armature (float) – Default joint armature to use if armature has not been defined for a joint in the MJCF.
armature_scale (float) – Scaling factor to apply to the MJCF-defined joint armature values.
contact_ke (float) – The stiffness of the shape contacts.
contact_kd (float) – The damping of the shape contacts.
contact_kf (float) – The friction stiffness of the shape contacts.
contact_ka (float) – The adhesion distance of the shape contacts.
contact_mu (float) – The friction coefficient of the shape contacts.
contact_restitution (float) – The restitution coefficient of the shape contacts.
contact_thickness (float) – The thickness to add to the shape geometry.
limit_ke (float) – The stiffness of the joint limits.
limit_kd (float) – The damping of the joint limits.
joint_limit_lower (float) – The default lower joint limit if not specified in the MJCF.
joint_limit_upper (float) – The default upper joint limit if not specified in the MJCF.
scale (float) – The scaling factor to apply to the imported mechanism.
hide_visuals (bool) – If True, hide visual shapes.
parse_visuals_as_colliders (bool) – If True, the geometry defined under the visual_classes tags is used for collision handling instead of the collider_classes geometries.
parse_meshes (bool) – Whether geometries of type “mesh” should be parsed. If False, geometries of type “mesh” are ignored.
up_axis (str) – The up axis of the mechanism. Can be either “X”, “Y” or “Z”. The default is “Z”.
ignore_names (List[str]) – A list of regular expressions. Bodies and joints with a name matching one of the regular expressions will be ignored.
ignore_classes (List[str]) – A list of regular expressions. Bodies and joints with a class matching one of the regular expressions will be ignored.
visual_classes (List[str]) – A list of regular expressions. Visual geometries with a class matching one of the regular expressions will be parsed.
collider_classes (List[str]) – A list of regular expressions. Collision geometries with a class matching one of the regular expressions will be parsed.
no_class_as_colliders – If True, geometries without a class are parsed as collision geometries. If False, geometries without a class are parsed as visual geometries.
force_show_colliders (bool) – If True, the collision shapes are always shown, even if there are visual shapes.
enable_self_collisions (bool) – If True, self-collisions are enabled.
ignore_inertial_definitions (bool) – If True, the inertial parameters defined in the MJCF are ignored and the inertia is calculated from the shape geometry.
ensure_nonstatic_links (bool) – If True, links with zero mass are given a small mass (see static_link_mass) to ensure they are dynamic.
static_link_mass (float) – The mass to assign to links with zero mass (if ensure_nonstatic_links is set to True).
collapse_fixed_joints (bool) – If True, fixed joints are removed and the respective bodies are merged.
verbose (bool) – If True, print additional information about parsing the MJCF.
- warp.sim.parse_usd(
- source,
- builder,
- default_density=1.0e3,
- only_load_enabled_rigid_bodies=False,
- only_load_enabled_joints=True,
- contact_ke=1e5,
- contact_kd=250.0,
- contact_kf=500.0,
- contact_ka=0.0,
- contact_mu=0.6,
- contact_restitution=0.0,
- contact_thickness=0.0,
- joint_limit_ke=100.0,
- joint_limit_kd=10.0,
- armature=0.0,
- invert_rotations=False,
- verbose=False,
- ignore_paths=None,
Parses a Universal Scene Description (USD) stage containing UsdPhysics schema definitions for rigid-body articulations and adds the bodies, shapes and joints to the given ModelBuilder.
The USD description has to be either a path (file name or URL), or an existing USD stage instance that implements the UsdStage interface.
- Parameters:
source (str | pxr.UsdStage) – The file path to the USD file, or an existing USD stage instance.
builder (ModelBuilder) – The
ModelBuilderto add the bodies and joints to.default_density (float) – The default density to use for bodies without a density attribute.
only_load_enabled_rigid_bodies (bool) – If True, only rigid bodies which do not have physics:rigidBodyEnabled set to False are loaded.
only_load_enabled_joints (bool) – If True, only joints which do not have physics:jointEnabled set to False are loaded.
contact_ke (float) – The default contact stiffness to use, only considered by the Euler integrators.
contact_kd (float) – The default contact damping to use, only considered by the Euler integrators.
contact_kf (float) – The default friction stiffness to use, only considered by the Euler integrators.
contact_ka (float) – The default adhesion distance to use, only considered by the Euler integrators.
contact_mu (float) – The default friction coefficient to use if a shape has not friction coefficient defined.
contact_restitution (float) – The default coefficient of restitution to use if a shape has not coefficient of restitution defined.
contact_thickness (float) – The thickness to add to the shape geometry.
joint_limit_ke (float) – The default stiffness to use for joint limits, only considered by the Euler integrators.
joint_limit_kd (float) – The default damping to use for joint limits, only considered by the Euler integrators.
armature (float) – The armature to use for the bodies.
invert_rotations (bool) – If True, inverts any rotations defined in the shape transforms.
verbose (bool) – If True, print additional information about the parsed USD file.
ignore_paths (List[str]) – A list of regular expressions matching prim paths to ignore.
- Returns:
Dictionary with the following entries:
”fps”
USD stage frames per second
”duration”
Difference between end time code and start time code of the USD stage
”up_axis”
Upper-case string of the stage’s up axis (“X”, “Y”, or “Z”)
”path_shape_map”
Mapping from prim path (str) of the UsdGeom to the respective shape index in
ModelBuilder”path_body_map”
Mapping from prim path (str) of a rigid body prim (e.g. that implements the PhysicsRigidBodyAPI) to the respective body index in
ModelBuilder”path_shape_scale”
Mapping from prim path (str) of the UsdGeom to its respective 3D world scale
”mass_unit”
The stage’s Kilograms Per Unit (KGPU) definition (1.0 by default)
”linear_unit”
The stage’s Meters Per Unit (MPU) definition (1.0 by default)
- Return type:
Note
This importer is experimental and only supports a subset of the USD Physics schema. Please report any issues you encounter.
- warp.sim.resolve_usd_from_url(url, target_folder_name=None, export_usda=False)[source]#
Download a USD file from a URL and resolves all references to other USD files to be downloaded to the given target folder.
- Parameters:
url (str) – URL to the USD file.
target_folder_name (str | None) – Target folder name. If
None, a time-stamped folder will be created in the current directory.export_usda (bool) – If
True, converts each downloaded USD file to USDA and saves the additional USDA file in the target folder with the same base name as the original USD file.
- Returns:
File path to the downloaded USD file.
- Return type:
Utility Functions#
Common utility functions used in simulators.
- warp.sim.velocity_at_point(qd, r)#
Returns the velocity of a point relative to the frame with the given spatial velocity.
- Parameters:
qd (spatial_vector) – The spatial velocity of the frame.
r (vec3) – The position of the point relative to the frame.
- Returns:
The velocity of the point.
- Return type:
vec3
- warp.sim.quat_to_euler(q, i, j, k)#
Convert a quaternion into Euler angles.
\(i, j, k\) are the indices in \([0, 1, 2]\) of the axes to use (\(i \neq j, j \neq k\)).
Reference: https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0276302
- warp.sim.quat_from_euler(e, i, j, k)#
Convert Euler angles to a quaternion.
\(i, j, k\) are the indices in \([0, 1, 2]\) of the axes in which the Euler angles are provided (\(i \neq j, j \neq k\)), e.g. (0, 1, 2) for Euler sequence XYZ.
- warp.sim.load_mesh(filename, method=None)[source]#
Load a 3D triangular surface mesh from a file.
- Parameters:
filename (str) – The path to the 3D model file (obj, and other formats supported by the different methods) to load.
method (str) – The method to use for loading the mesh (default
None). Can be either"trimesh","meshio","pcu", or"openmesh". IfNone, every method is tried and the first successful mesh import where the number of vertices is greater than 0 is returned.
- Returns:
Tuple of (mesh_points, mesh_indices), where mesh_points is a Nx3 numpy array of vertex positions (float32), and mesh_indices is a Mx3 numpy array of vertex indices (int32) for the triangular faces.